
在2018年,联邦航空管理局(FAA)Next Gen办公室发布了一份关于无人飞机系统(UAS)交通管理(UTM)的初步总体业务概念(V1.0),提出了一个愿景,并描述了在UTM生态系统中开发支持架构和运行的相关业务和技术要求。UTM被定义为FAA支持在低空空域运行的UAS操作的方式。UTM利用行业在FAA监管机构下提供服务的能力,而这些服务目前并不存在。这是一个基于社区的交通管理系统。在该系统中,提供运营支持服务的运营商和实体负责业务的协调、执行和管理,规则由FAA制定。这套联合服务使UAS运营商之间的业务能够合作管理,由第三方支持提供商通过网络信息交换提供便利。UTM旨在通过一个创新的、有竞争力的服务供应商开放市场,支持对各种业务的需求和期望,其复杂性和风险不断增加。所提供的服务是可互操作的,以便UTM生态系统能够扩展,以满足UAS操作员社区的需要。
联邦航空局更新了这一业务概念(ConOps),以记录UTM的持续成熟,并与政府和行业利益相关者分享愿景。UTM Con Ops V2.0继续将重点放在离地面400英尺(121.92米)(AGL)以下的UTM操作上,但也解决了在不受控制(G类)和受控(B类、C类、D类、E类)空域环境内和跨越越来越复杂的操作。V2.0更新并扩展了一组操作场景,描述了在密度更大的空域中更复杂的操作,包括在受控空域中的视觉视线以外(BVLOS)操作。V2.0包括对几个UTM组件的更新描述方法,包括UAS卷保留(以前称为动态限制)、性能授权、数据归档和访问、USS服务类别、UTM/ATM应急通知以及与UTM操作相关的安全方面。V2.0还介绍了新的内容,包括控制空域内BVLOS飞行的空域授权、UTM体系结构支持UAS运营商的远程识别,以及与业界的标准开发工作,作为启用UTM操作的组成部分。
FAA UTM Con Ops文档不会规定解决方案或具体的实现方法。相反,它描述了与UTM操作相关的基本概念和操作要素,这些要素将为参与实施UTM的许多行为者和利益攸关方制定解决方案提供信息。他们还支持螺旋式实施方法-通过对更复杂的空气空间环境的分析,成熟这一概念,并通过实地演示进行测试和验证,包括国家航空航天局(NASA)技术能力水平(TCL)、FAAUTM试点方案(UPP)和UAS集成试点方案(IPP)演示。未来的版本将根据需要继续开发,以反映研究的进展和与FAA、NASA和行业合作伙伴合作导致的持续概念成熟。
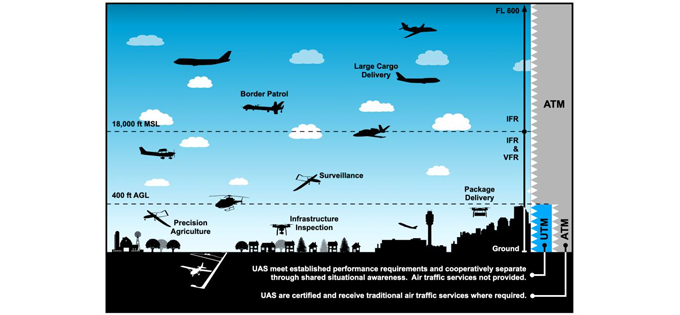
这个ConOpsV2.0的重点是低于地面400英尺(AGL)的UTM操作,并解决在不受控制(G类)和受控(B类、C类、D类、E类[表面])空域环境中和跨越越来越复杂的UTM操作(与ConOpsV1.0相比)。它介绍了在受控空域中包括视觉视线以外(BVLOS)操作的场景。G类空域是NAS中尚未被指定为受控空域的空域(即:甲,乙,丙,丁或戊类)。因此,它被指定为不受控制的空域。ATC没有责任在G类空域提供分离服务;相反,载人飞机主要通过基于特定原则和操作规则的视觉手段合作管理其操作。为了向UAS提供与载人飞机相同的访问,UTM旨在为UAS和其他参与飞机在不受控制的空域提供类似的合作交通管理手段。受管制空气空间包括被指定为A、B、C、D和E类的空气空间。虽然空管为这些空气空间类别中的载人和无人驾驶飞机提供不同程度的服务,但它们不向在400英尺AGL下运行的无人驾驶飞机提供服务。UAS业务由飞行人员合作管理,与ATM系统的交互受到限制。
理想体系结构
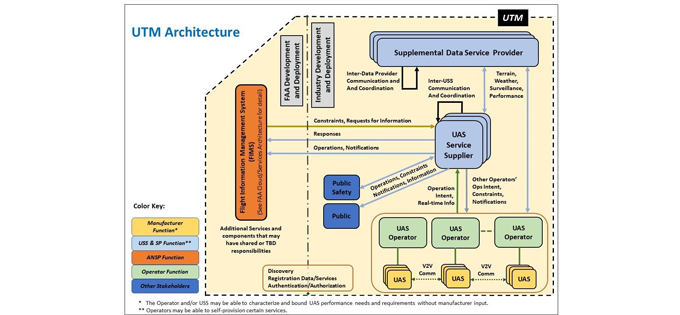
在UTM生态系统内,FAA维持其空域和交通业务的监管和业务权限;然而,这些业务不是由ATC管理的。 相反,它们通过应用程序编程接口(API)由高度自动化系统的分布式网络中的一组联合参与者组织、协调和管理。下图描述了一个概念UTM体系结构,它在高级别上直观地识别各种参与者和组件、它们的上下文关系以及高级函数和信息流。图中的灰色虚线表示FAA与作为UTM一部分交互的基础设施、服务和实体的行业责任之间的界限。如图所示,UTM包括FAA、运营商和提供服务和/或显示UTM生态系统中对服务需求的各种实体之间的复杂关系。这个例子突出了一个模型,它在很大程度上利用第三方实体来支持FAA和运营商各自的角色和责任...
操作
预期UTM操作人员将遵守适当的操作规则、条例和政策。操作员、车辆和USS服务必须达到足够的水平,以充分负责的方式在任何时候保持与危险的分离。UTM操作员由一套服务提供支持,这些服务旨在通过信息交换提供视觉协作操作一直需要的类似的共享态势感知。UTM业务框架通过以下方式支持管理和安全开展业务:(1)发布业绩授权,以确保满足操作员的业绩要求;(2)在受控制空域开展业务所需的空域授权;(3)支持共享飞行意图的业务规划;(4)空域限制和咨询信息传播;(5)使用服务、技术和装备开展非冲突业务...
空域管理
UTM的设计是为了确保UAS业务在空域访问方面得到授权、安全、安全和公平。UTM对操作和性能提出了与操作员、车辆、服务、操作环境和空域级别考虑相适应的要求。空域管理的基础是通过以下方式对空域访问的安全、安保和公平采取分层方法:(1)性能授权和认证,以确保运营商、设备和USS满足计划操作的适当能力和性能要求;(2)空域授权,向ATM利益相关者提供控制空域UTM操作的态势感知;(3)通过交互式飞行前规划对业务进行战略交通管理;(4)通过解除冲突服务和飞行中冲突警报向UTM参与者提供分离服务;包括飞机意图、空域限制和危险,使用DAA进行明确的指导,通过行动规划、协调程序和响应协议;(5)应急管理,以及预先编程的系统或车辆对飞行异常的响应;(6)通过使用适当的地面或机载设备(包括DAA/避碰逻辑)保护空域限制和警告的近实时通知,以及通过RID信息交换;(7)识别飞机和UAS操作员/RPIC...
UTM成就
联邦航空局与美国宇航局、工业界和更大的UTM社区协调,正在实施UTM的螺旋式发展,从低复杂度操作开始,并在模块中构建更高复杂性的操作概念和要求。这种方法与UAS规则制定路线图相一致。每个新的开发周期都旨在成熟UTM架构和提供的服务,最终支持UAS的全部操作,从遥控飞机到指挥导向的UAS和完全自主的UAS。发展阶段基于三个面向风险的指标:(1)地面上的人数和财产数量;(2)靠近无人机行动的载人飞机数量;(3)无人机行动的密度。预计空域用户的业务需求将随着业务的复杂性和开展这些业务的环境(例如,大量进入空域的需求密度)而相应增加。预计UTM将继续成熟,包括在人口稠密地区的高密度、受严格管制的空域中日益复杂的操作,对UAS性能和能力的要求越来越高。利益攸关方将在必要时采用与数据交换、操作协议和设备性能有关的适用的公共和私营部门标准,以支持设想的管理系统的高度自动化。初步实施UTM的目标是,利用当前工业提供的技术和业务能力(例如移动通信、现有地面和空中基础设施),尽量减少部署和开发时间,能够满足安全、安保(网络安全、复原力、故障模式、冗余)和效率方面的适当性能要求,同时尽量减少环境影响,尊重公民的隐私和安全。这种螺旋式的UTM开发方法提供了几个优点。首先,通过最初处理低复杂度环境(技术要求和服务应该是最不严格的),可以利用满足性能要求且不需要全面架构的当前能力将实现简化到这些环境中。第二,根据环境风险和复杂性规模开发UTM允许可扩展、灵活、适应性强的服务,这些服务对于环境来说是“合适的大小”,而不是一刀切。 UTM设计必须能够适应地面和空中的新技术和自动化,并日益允许与UTM生态系统进行更先进形式的交互,主要是通过能够进行数字信息和数据交换的互操作系统。最终,UTM必须涵盖UAS需求、业务模式、应用和技术的范围,并支持与载人交通共存的安全和高效的操作,并尽可能少地干扰现有的ATM系统,同时保持公平和公平的空域访问。
最近更新