将无人飞行器(UAV)添加到国家空域(NAS)的关键要素是这些无人飞行器的功能,而无需现有空中交通管制(ATC)的干预。认为已经以95%的容量运行的系统将能够吸收数千个需要随时进行指导和通信的小型无人飞机是不现实的。
因此,无人机行业与监管机构,学术界和美国航空航天局等政府组织合作,全天候24/7致力于开发无人驾驶交通管理(UTM)系统,该系统将处理无人驾驶平台,而ATC处理有人驾驶飞机。
每个人都致力于维护一个安全的NAS,所有用户(包括无人驾驶飞机社区)都可以通过它来例行,公平和公正地访问。UTM满足了无人机操作的许多空域集成要求。这意味着它需要跨UTM和UAV利益相关者社区采取协调一致的方法,以提供一个生态系统,该生态系统最终将使该行业能够利用无人机带来的市场机会。
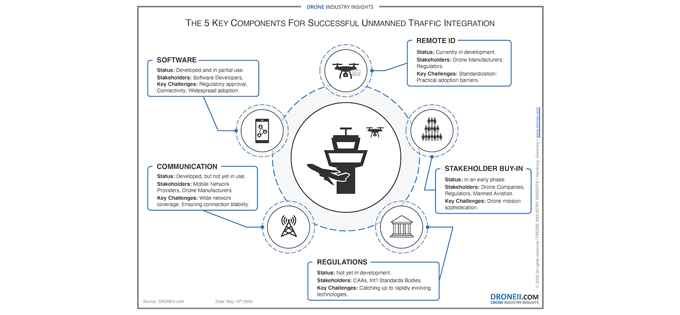
著名的无人机商业智能公司Drone Industry Insights(DII)最近发布了一份全面的白皮书,概述了成功的UTM系统的五个关键组成部分。DII在文件中论述了这五个组成部分是什么,主要利益相关者以及仍然存在的主要挑战:
(1)软件
(2)远端ID
(3)规章制度
(4)通讯
(5)利益相关者的支持
在欧洲,提出了几种不同的技术来促进将无人机集成到NAS中。这些范围从ADS-B IN / OUT到FLARM IN / OUT,再到恢复无人机的遥测并将其发送到UTM,远程ID等。
许多公司如Unifly,Airmap和Altitude Angel当前都提供UTM系统。但是,像所有技术一样,它们也有其优点和缺点。
Involi公司专注于开发技术,该技术通过添加实时通用远程ID跟踪器(称为KIVU)为现有的UTM提案增加功能。KIVU用户将能够同时可视化跟踪的无人机和周围的空中交通。
远程ID有两种类型:
(1)广播远程ID:无人驾驶飞机以某个频率发射其ID和位置,并且在其传输范围内的任何设备都可以接收到;
(2)网络远程ID:在这种情况下,不广播无人机的ID和位置,而是通过Internet(或其他电信基础设施)将其传输给无人机用户,授权机构等。
深圳市临近空间科技在研的区域空域安全系统也是采用ID监控策略,但是不同于现有的远程ID策略。深圳市临近空间科技的ID监测是针对因为功耗能力受限的小型无人机或者其它飞行器,通过小型无人机的通信链路获取无人机状态信息(类似第二种远程),但是并非在网络端完成风险规避,而是通过地面广播系统广播ID,实现区域内无人机能够清楚周边的空域环境,以便规避潜在的风险。
最近更新